CMU10414-Fall2022课程笔记
本文最后更新于 2026年3月19日 下午
课程笔记
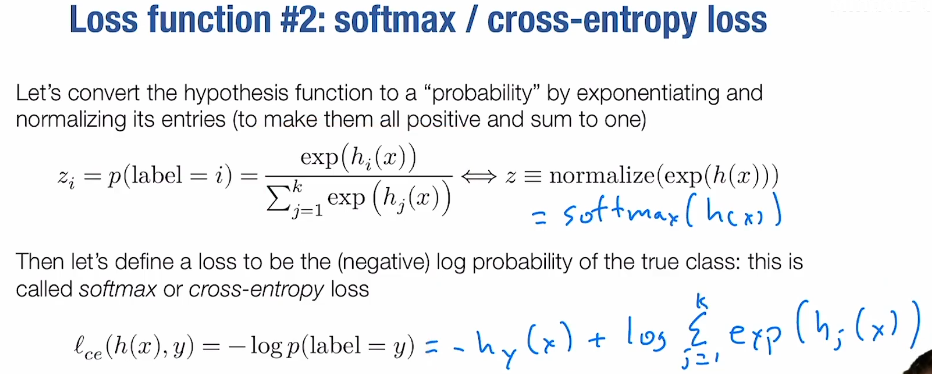
softmax
- 监督学习/无监督学习
- 假设函数/损失函数/优化方法
- 有些err函数是不可微分的,所以用softmax(激活函数,引入非线性层)->交叉熵(-log)作为损失函数
- 转换为优化问题,使用梯度下降/随机梯度下降
设为样本数,为特征数,为分类数
为假设函数,为在上的分量
softmax为:
softmax存在数值爆炸问题,可以对,映射范围为0~1,每个分量和为1
softmax_loss为:
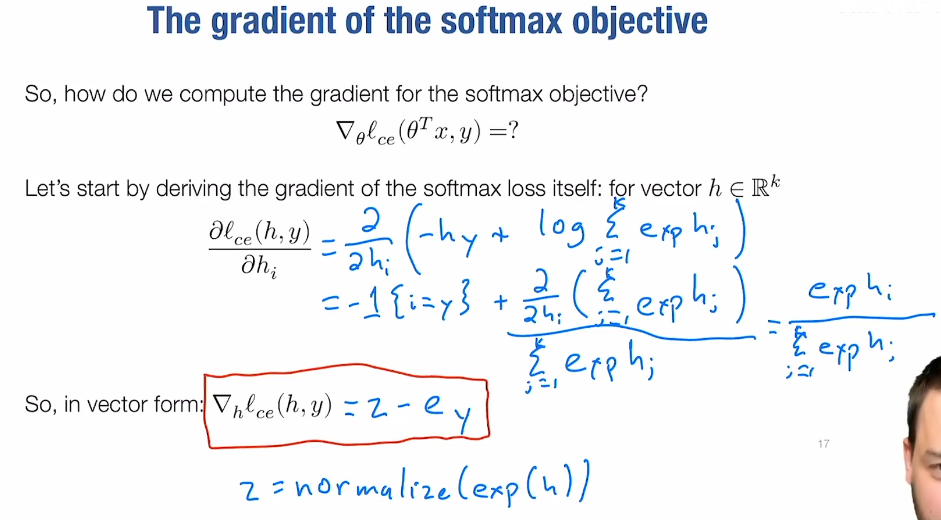
对求偏导:
如果,,则偏导为:
批量梯度下降,选择个样本然后算出梯度平均,然后对参数立即更新
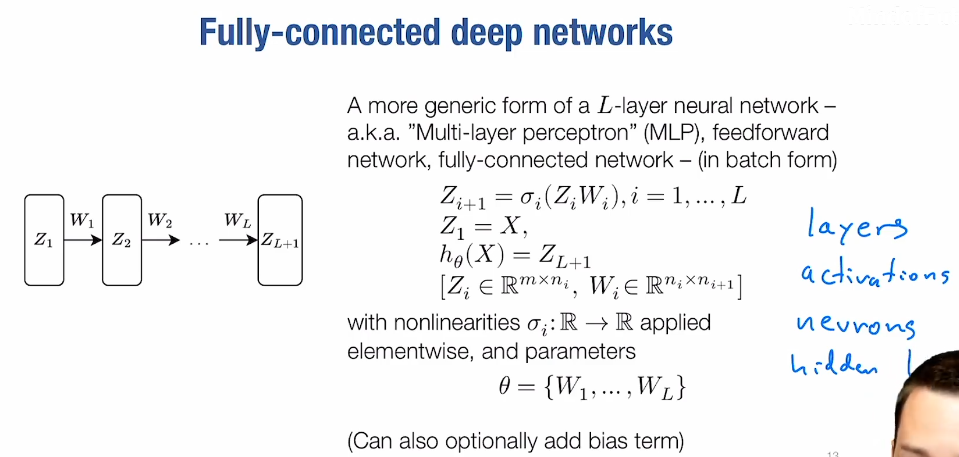
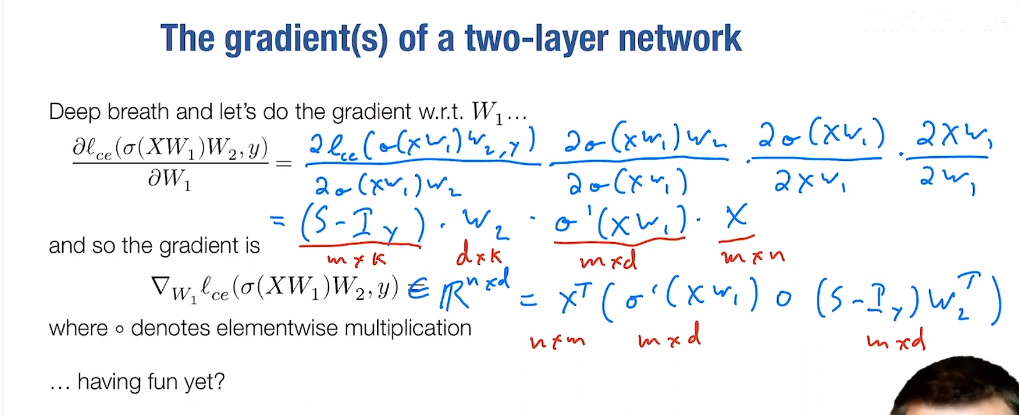
neural networks
- 引入非线性层
- 有几个W(权重)就是几层网络
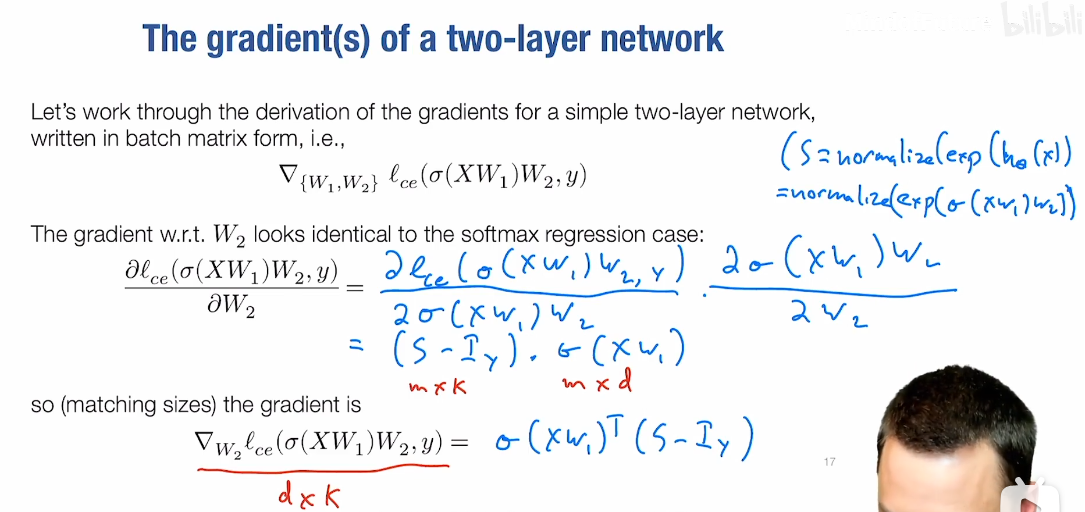
- 对于一个两层网络的梯度推导:
- 对于多层:
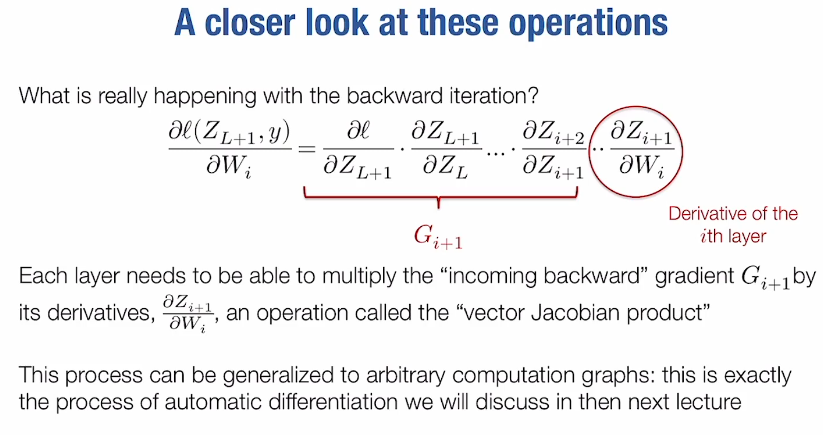
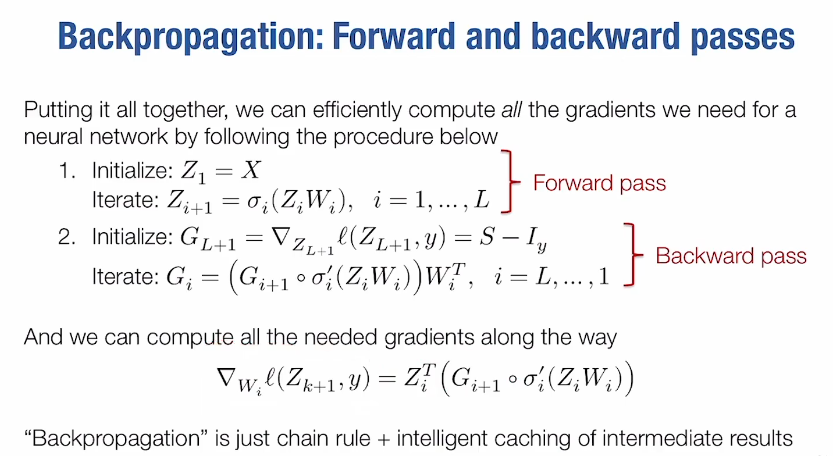
通过反向传播计算到,从而可以算出梯度(需要保留前向传播算出的)
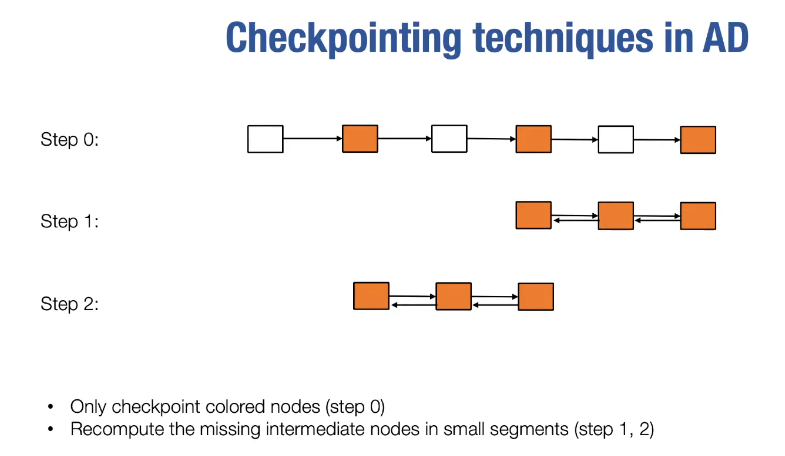
automatic differentiation
- forward mode AD
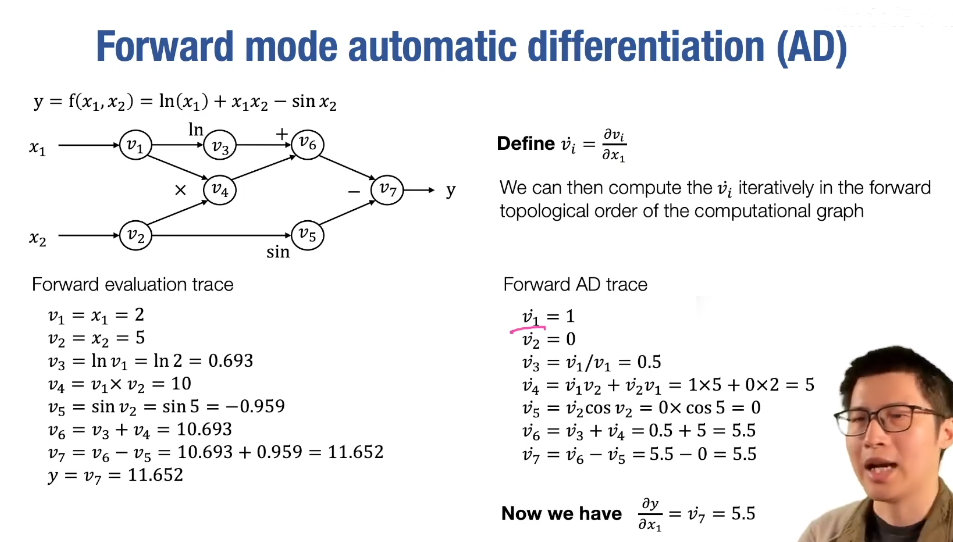
这种方法一次只能计算出,对于还要再传播一次
- reserve mode AD
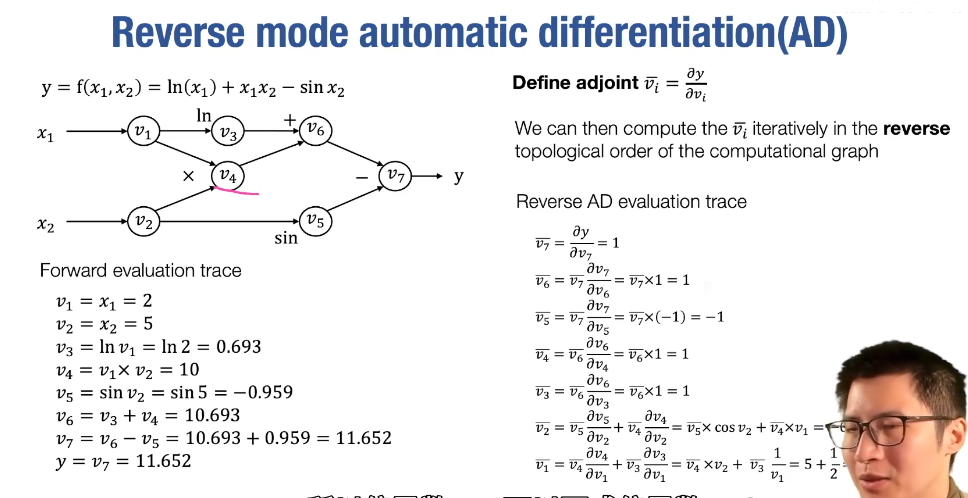
使用反向的方法可以一次推导出所需要的所有偏导数
- reserve mode AD by extending computational graph
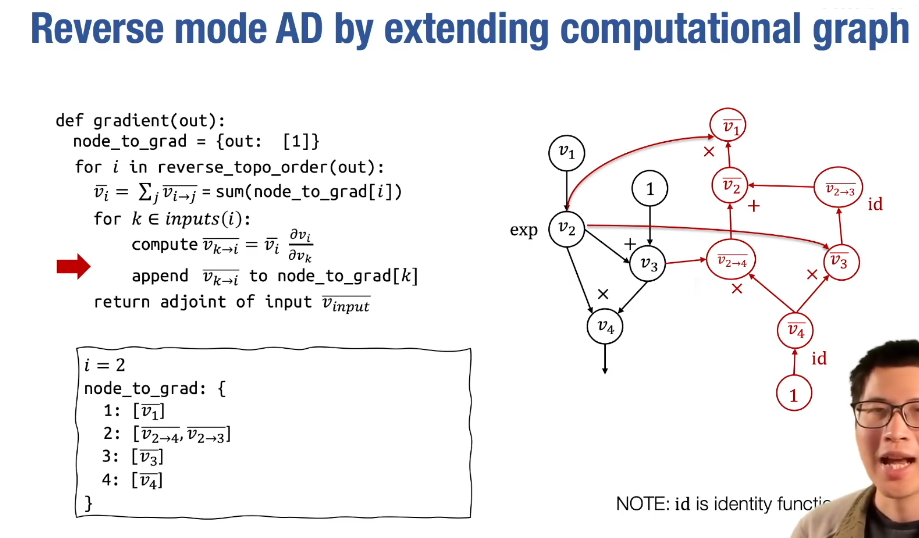
使用扩展计算图,可以方便计算梯度的梯度
- broadcast to 操作(从后往前比较维度,扩展缺失的或者为1的维度)求梯度,需要对扩展方向求和
- 求和操作求梯度,则使用broadcast to操作扩展为原shape
- 多维矩阵乘法只看最后两个维度,前面的维度扩展为相同的批次
fully connected networks
-
matrix broadcasting(does not copy any data)
-
Newton’s Method
-
momentum
-
unbiased momentum terms 让步长一致
-
nesterov momentum 在动量方向“未来位置”计算梯度,能提前感知参数更新后的地形,避免盲目跟随动量
-
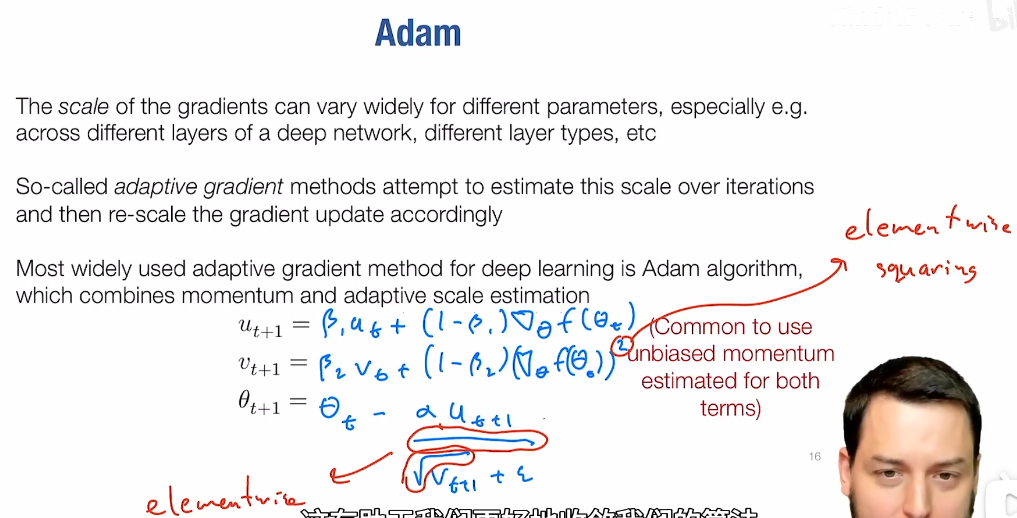
Adam
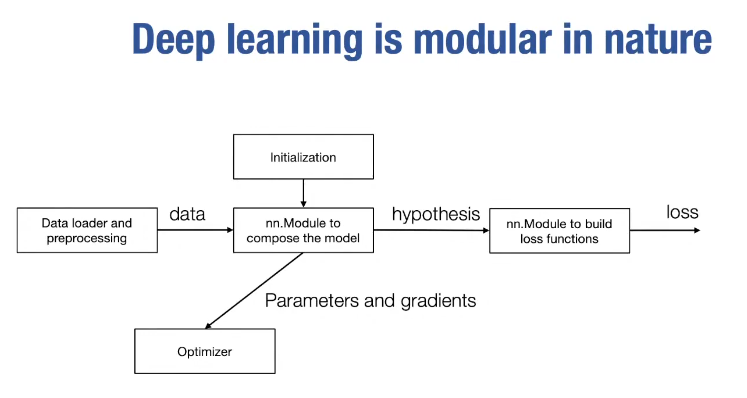
neural network abstraction
- caffe 1.0 / tensorflow (静态计算图) / pytorch (动态计算图)
normalization and regularization
- 深度网络的权重初始化很重要,会导致不同的激活方差,但是可以通过normalization修正
- layer normalization / batch normalization
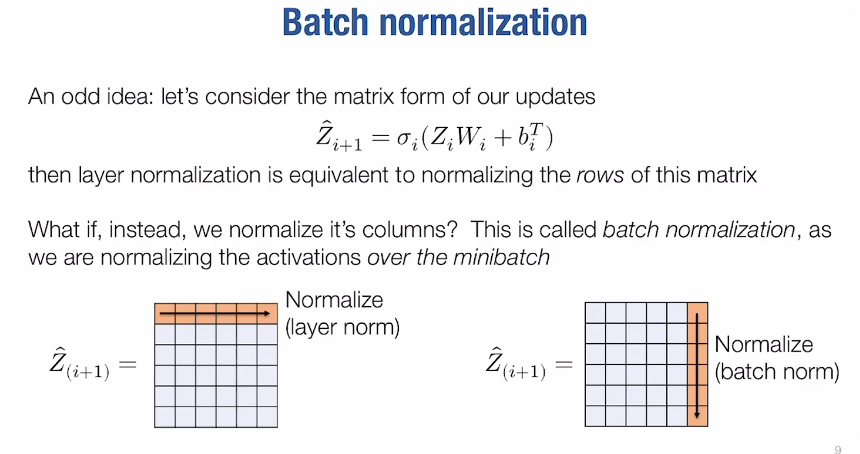
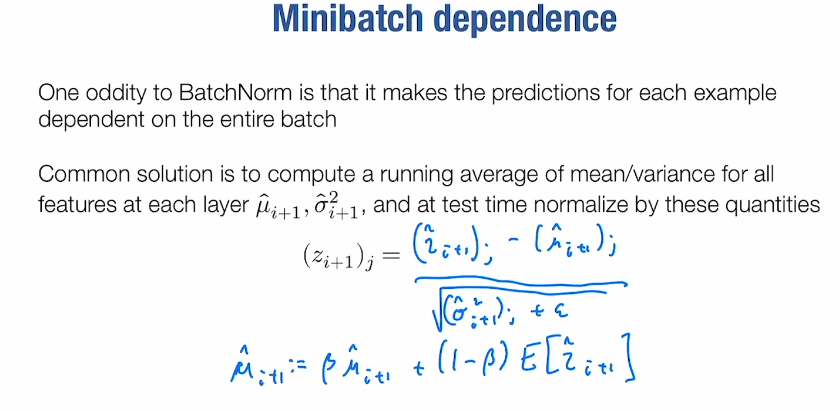
- batch normalization 导致依赖问题,训练时使用实际均值,测试时使用经验均值
- regularization 提高函数泛化性(模型参数数量大于样本数量
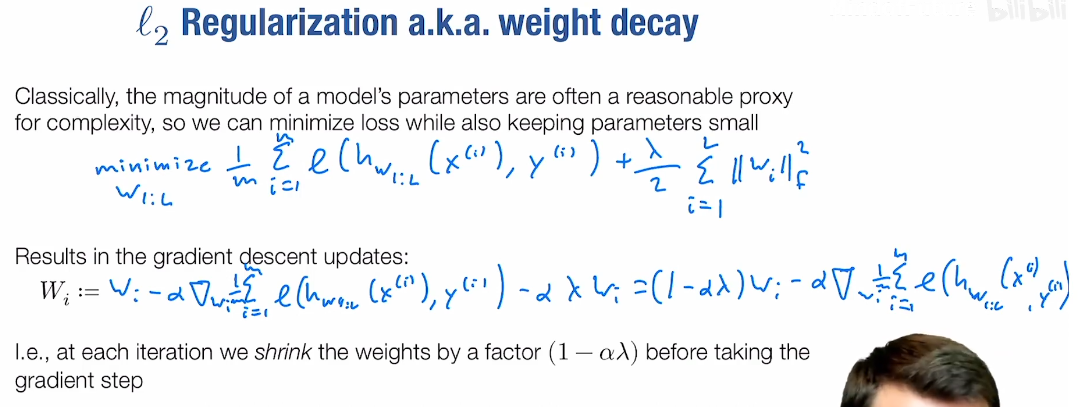
- l2 regularization / weight decay,添加正则化项,约束参数大小
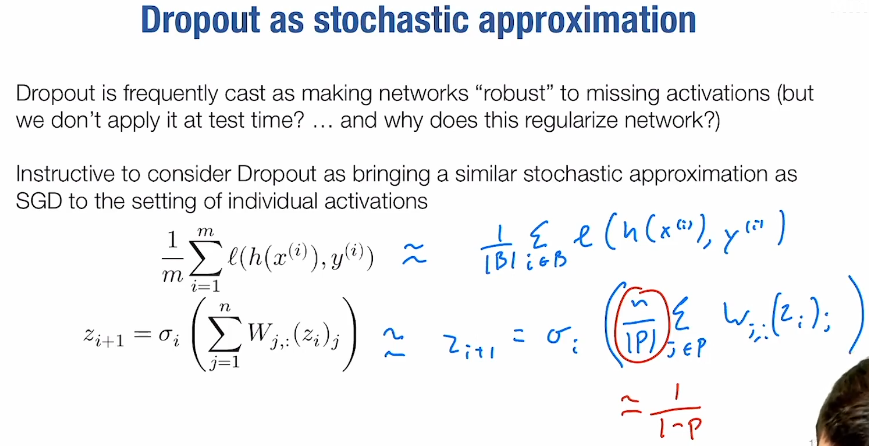
- dropout 随机将激活值置为0
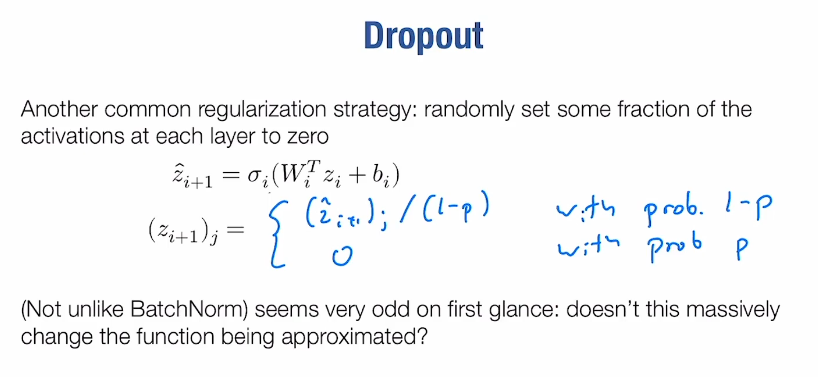
提供了类似于SGD的近似:
convolutional networks
- convolutions / padding / strided convolutions / pooling / grouped convolutions
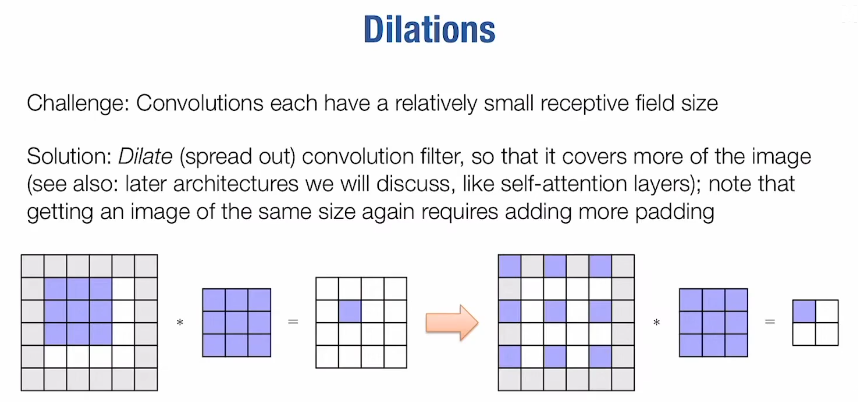
- dilations
Z = batch * height * width * cin, W = k * k * cin * cout- im2col
hardware acceleration
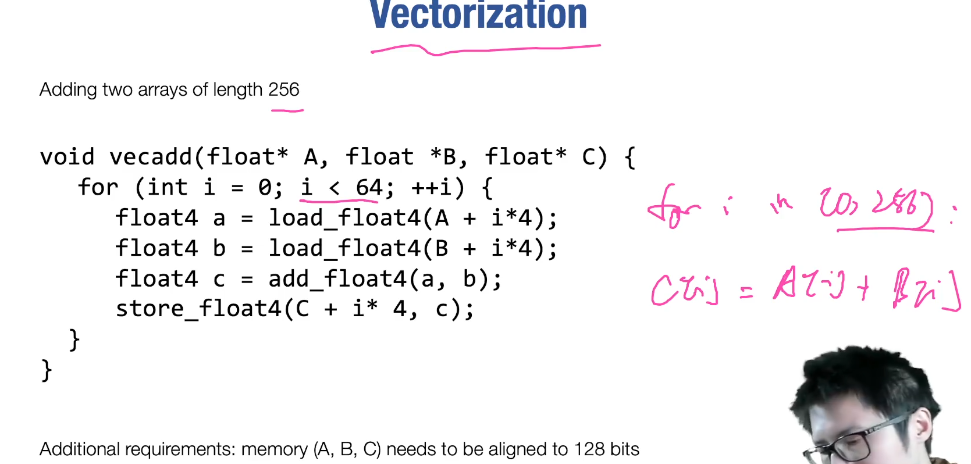
- vectorization 需要考虑内存对齐
- data layout and strides, strides 布局允许更灵活的数据变换(表示内存访问需要跳过的字节数
- parallel for
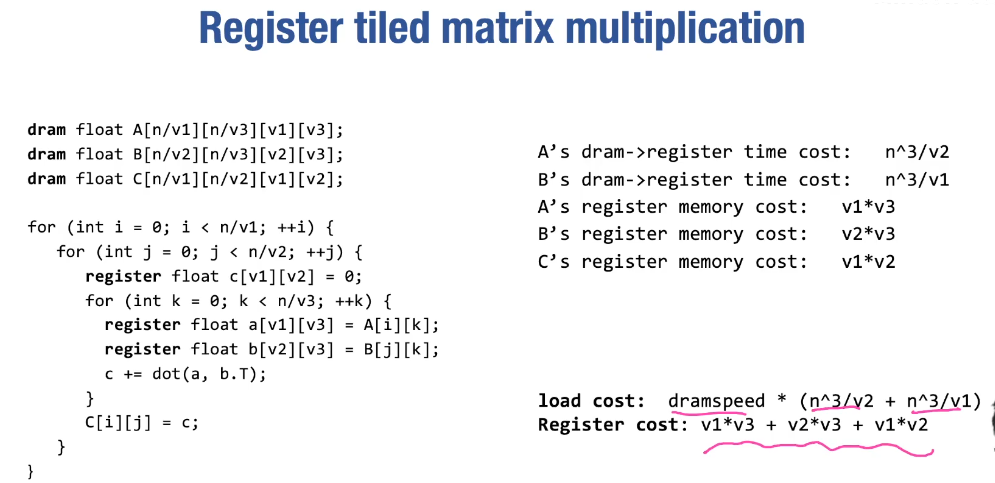
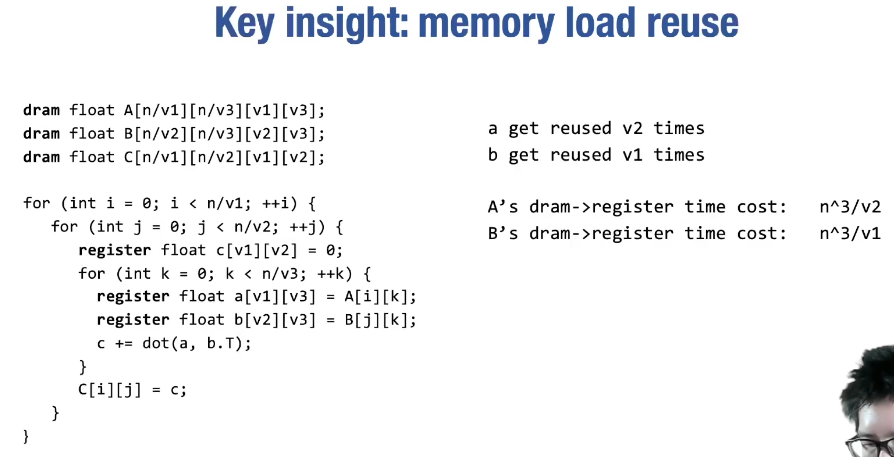
- matrix multiplication
register tiled
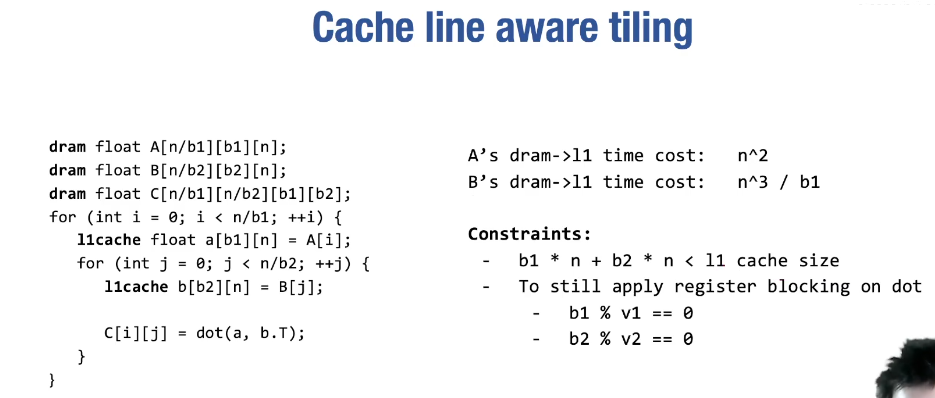
cache line aware
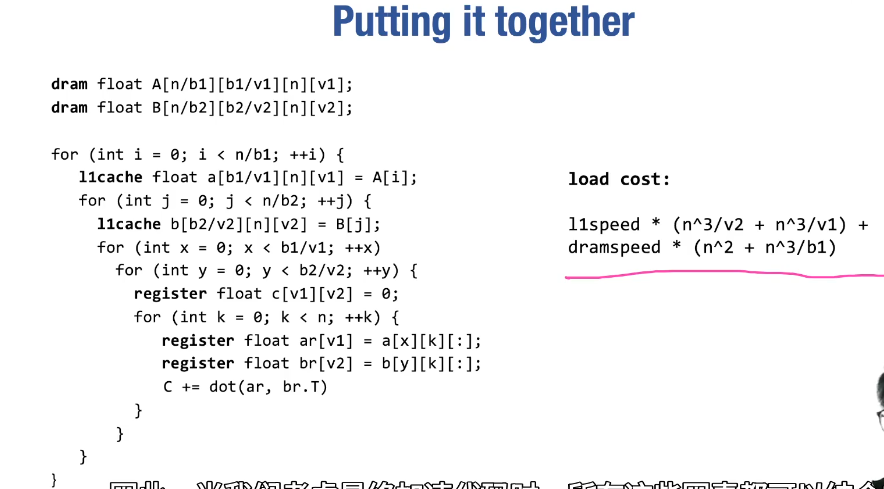
both
why
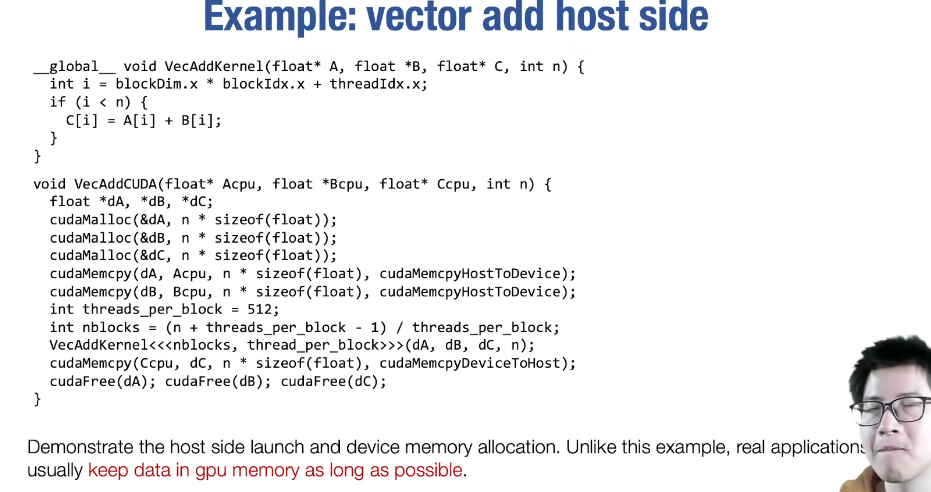
gpu acceleration
- vector add
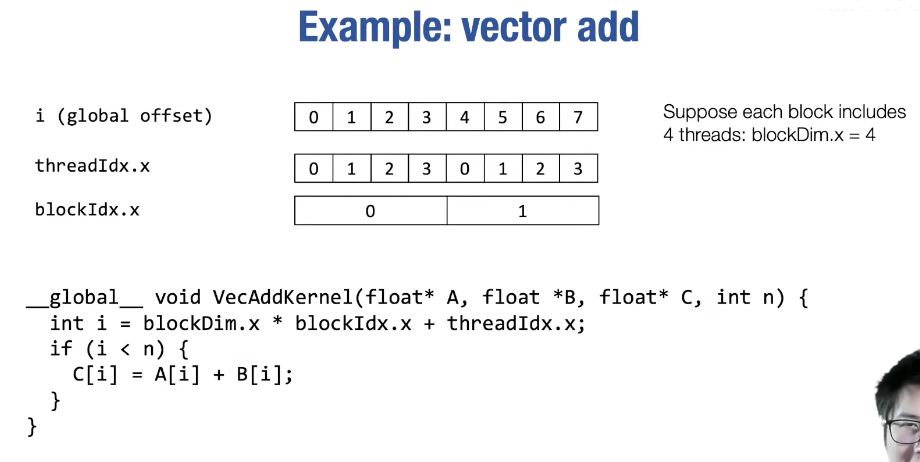
cpu side
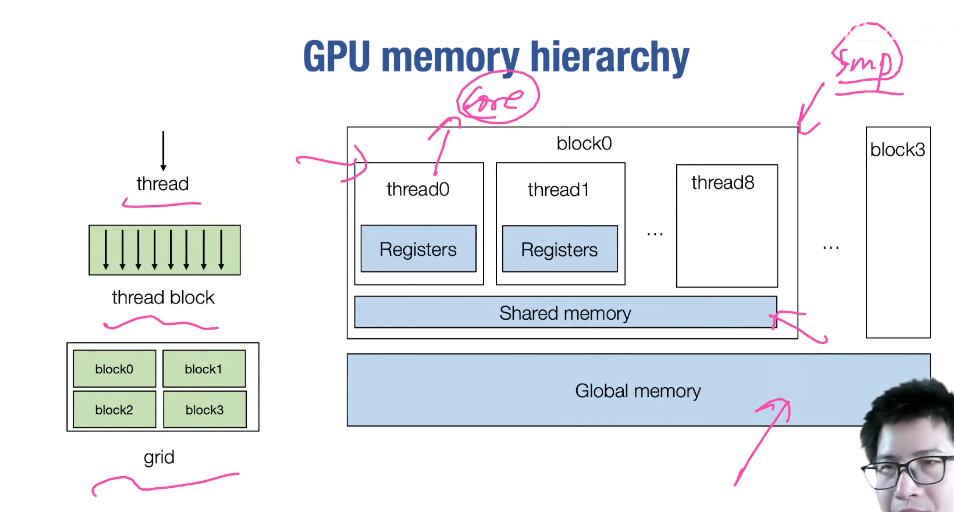
- gpu memory
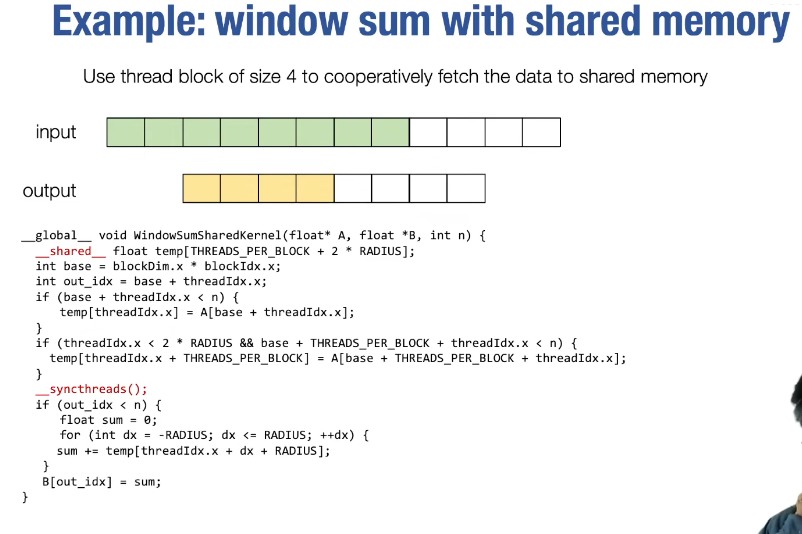
- window sum
- matrix multiplication
training large models
- reduce memory
- all reduce
- parallel training(data parallel / model parallel)
generative adversarial networks
- 生成对抗网络:
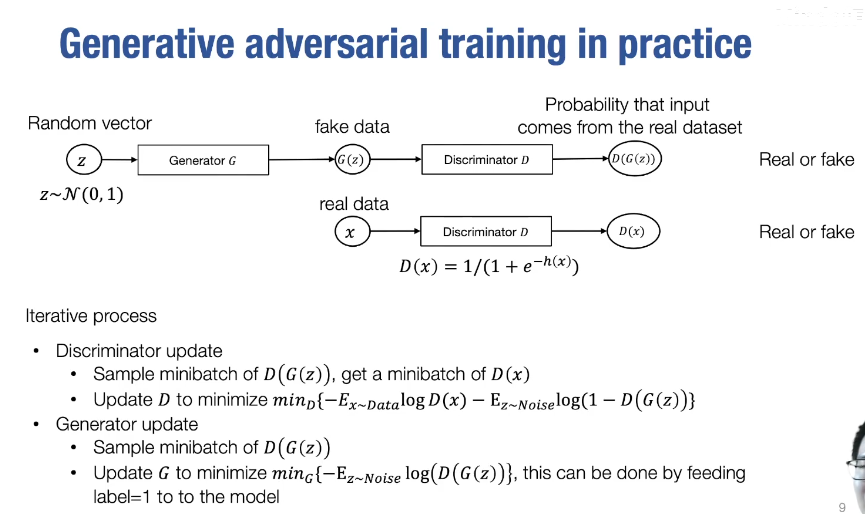
- convolutional GAN
- cycle GAN
sequence modeling and recurrent networks
- recurrent neural networks
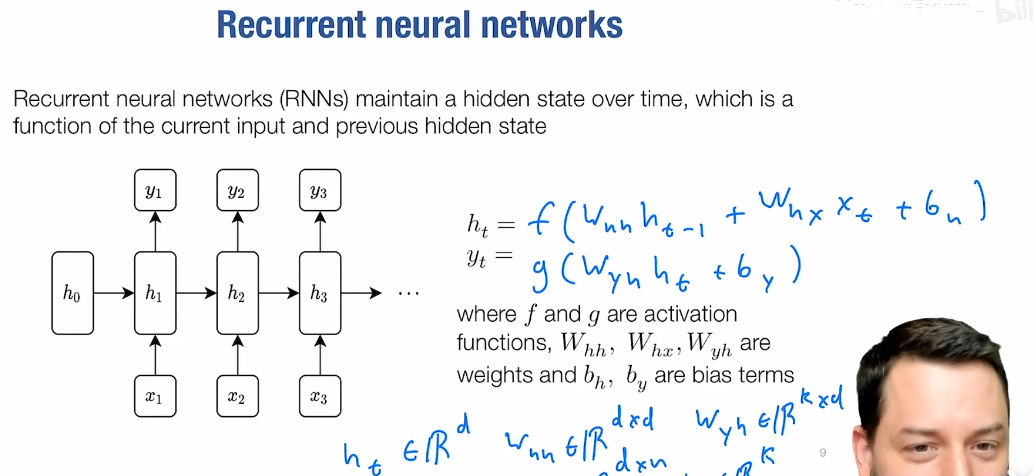
- stacking rnns
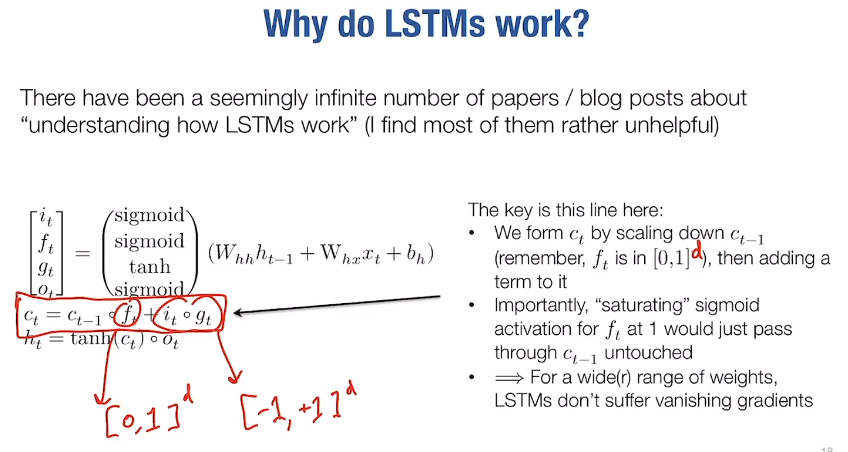
- lstm 解决梯度消失/爆炸问题
- seq2seq model / bidirectional rnns
- block training lstm
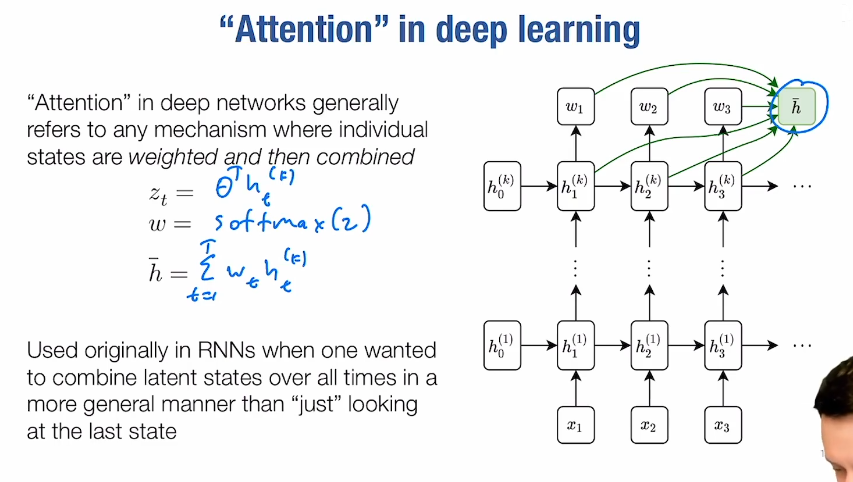
transformer
- attention
model deployment
- onnx
- machine learning complication